ROS 2 C++ Code Coverage
Published
Instructions on setting up C++ code coverage using ROS, colcon and clang based on my experience on Cavalier Autonomous Racing. A problem with a surprisingly simple setup, but took many iterations to get right.
I recent set up test coverage reports for Cavalier Autonomous Racing. Despite me thinking it was simple, it ended up taking me several hours. Read this post to avoid my pain.
I am assuming the stack uses:
- a ROS 2 Monorepo (we have 30+ nodes in our stack)
- clang(++) for C++ Code (note not standard to use this toolchain)
- CMakeLists
- colcon
Tools Used
Setup
First, ensure the following are installed:
sudo apt update && sudo apt install -y \
clang \
llvm \
lld \
llvm-cov \
file#!/bin/bash
# =========
# Builds and outputs a coverage report using `llvm-cov` to `public` directory and then shows a summary of the coverage report
source /opt/ros/$ROS_DISTRO/setup.sh
PACKAGES_UP_TO="iac_launch"
colcon build \
--merge-install \
--packages-up-to $PACKAGES_UP_TO \
--cmake-force-configure \
--cmake-args \
-DCMAKE_CXX_FLAGS="-g -Og -fprofile-instr-generate -fcoverage-mapping" \
-DCMAKE_C_FLAGS="-g -Og -fprofile-instr-generate -fcoverage-mapping" \
-DCMAKE_CXX_COMPILER="clang++" \
-DCMAKE_C_COMPILER="clang"
# tells LLVM to output the profiles with the process name (`%p`) and the binary id (`%b`),
# used to avoid conflicts between profile names
LLVM_PROFILE_FILE="$PWD/%p.%b.profraw"
colcon test \
--merge-install \
--packages-up-to $PACKAGES_UP_TO \
--event-handlers console_direct-
llvm-profdata merge -sparse *.profraw -o coverage.profdata
FILES=$(find install build -type f \( -executable -o -name '*.so' \) ! -path '*_msgs*' ! -name '*.py' ! -name '*.bin' -exec sh -c 'for f; do case "$(file --brief --mime-type "$f")" in application/x-executable|application/x-sharedlib) printf -- "--object=%s " "$f";; esac; done' _ {} +)
llvm-cov show \
--format=html \
--output-dir=public \
--instr-profile=coverage.profdata \
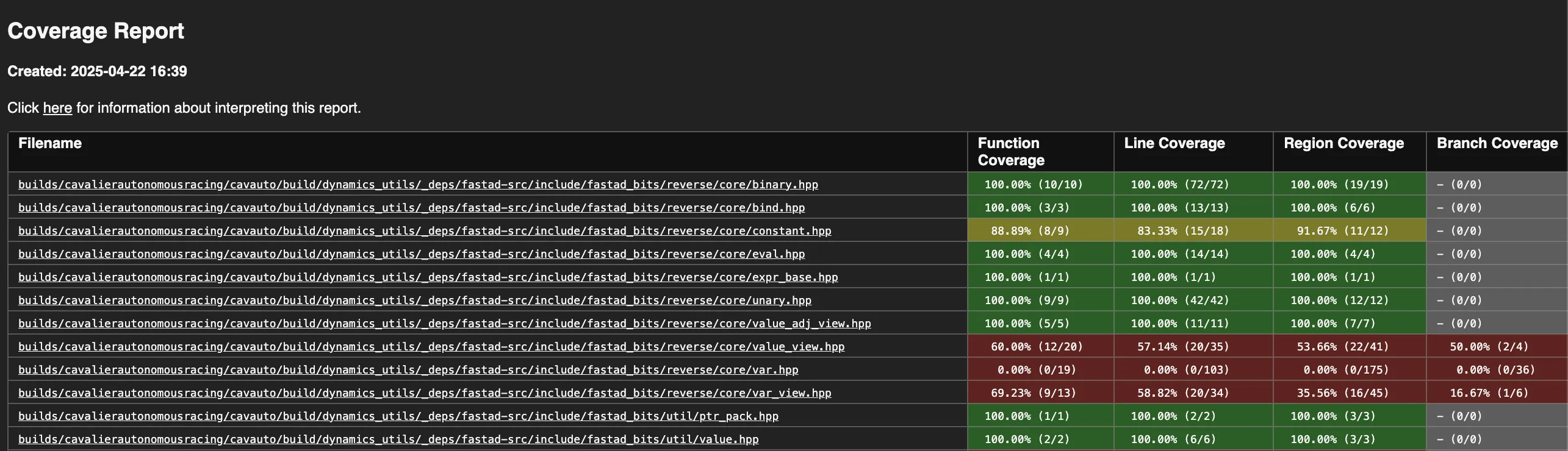
$FILESAfter the report is generated, a summary is printed in the command line. Viewing the HTML report in a browser is as simple as running this locally.
python3 -m http.server -d . 8080This produces a standard coverage report which everyone is used to seeing
Why is this required?
If you examine the llvm-cov report it mentions that multiple files can be passed. However, the --object= is needed for each. Without this, only code coverage for the first passed library or executable and it will not tell you why.
$ llvm-cov report --help
OVERVIEW: LLVM code coverage tool
USAGE: llvm-cov report [options] Covered executable or object file. --sources <Source files>
OPTIONS:
Color Options:
--color - Use colors in output (default=autodetect)This one issue took me several hours to debug, plus getting the binary filtering criteria strict enough to not cause the script to fail.
I hope this post helped you avoid some frustration.
Great Resources
Breaking down my personal development setup
Stay in touch
Subscribe to my RSS feed to stay updated
Have any questions
Feel free to contact me! I will answer any and all inquires